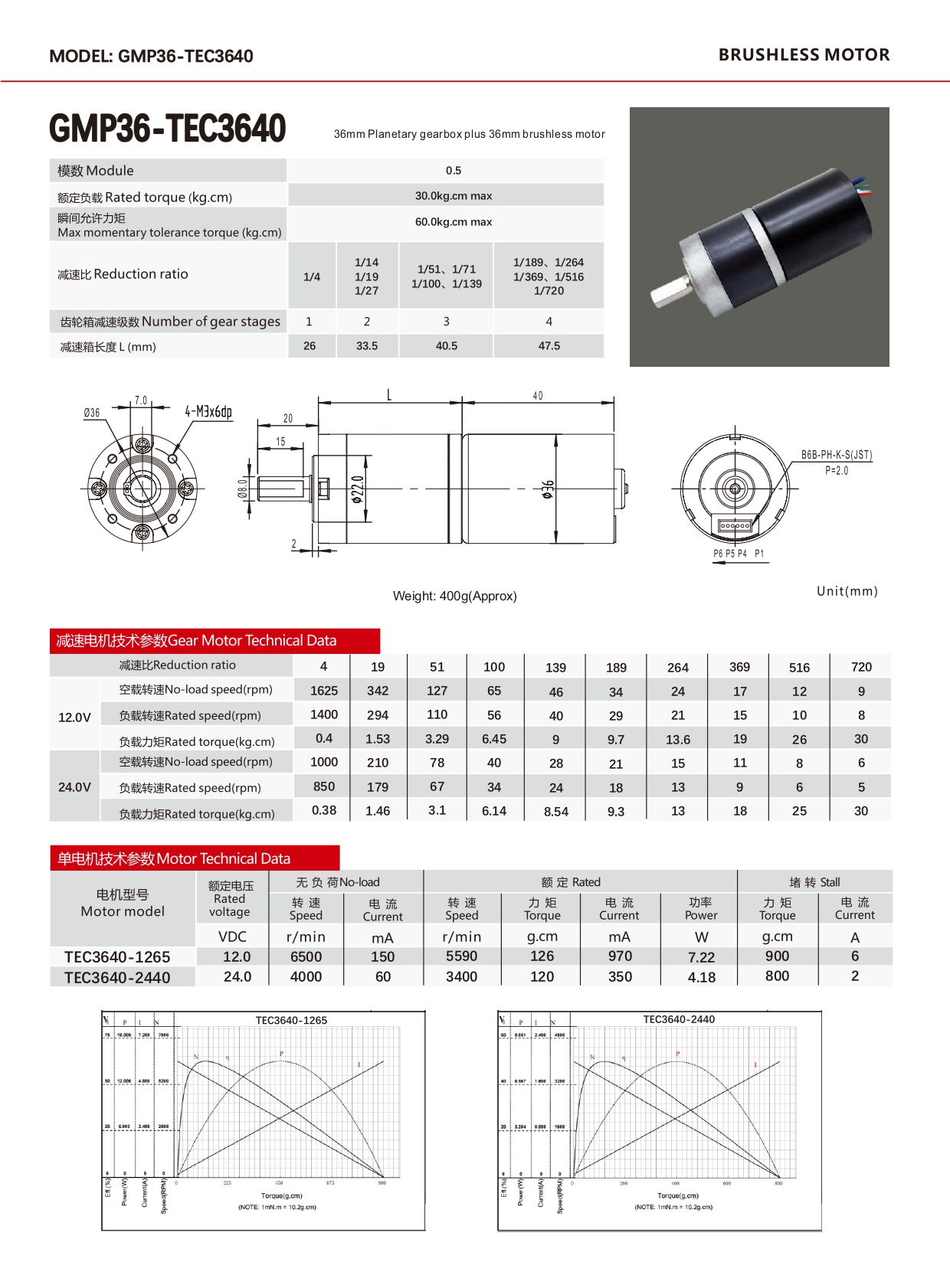
GMP36-TEC3640 36 mm bezkontaktu planētu reduktora motors ar augstu griezes momentu, BLDC reduktors, 12 V, 24 V, rūpnieciskajai automatizācijai un AGV





Augsts griezes momenta blīvums: 36 mm bezsuku motors ir optimizēts augstai magnētiskajai plūsmai, nodrošinot iespaidīgu nepārtrauktu griezes momentu. Planētu pārnesumkārba vēl vairāk palielina šo griezes momentu, ļaujot ierīcei vadīt lielas slodzes ar mazu ātrumu un augstu efektivitāti (parasti >85% kopumā).
Bezsuku uzticamība: Tā kā nav nodilstošu sukām, šis motors piedāvā izcilu ekspluatācijas laiku (parasti vairāk nekā 10 000 stundas) un praktiski bez apkopes. Tas rada arī mazāku elektrisko troksni un augstāku efektivitāti nekā alternatīvas ar sukām.
Kompakts aksiālais garums: Ar tikai 40 mm garumu (neskaitot vārpstu) šis reduktormotors ir ievērojami īss savam diametram, padarot to ideāli piemērotu lietojumiem, kur dziļums ir ierobežots, bet platums ir pieejams.
Precīza planētu pārnesumkārba: Daudzpakāpju pārnesumkārbai ir rūdīta tērauda zobrati un precīzi gultņi, lai samazinātu brīvkustību (<1-2° tipiski). Ir pieejami dažādi redukcijas koeficienti no 5:1 līdz 500:1, lai atbilstu ātruma/griezes momenta prasībām.
Integrētas atgriezeniskās saites iespējas: slēgtas cilpas ātruma un pozīcijas kontrolei var integrēt Hola sensorus vai kodētājus. 12 V vai 24 V sistēmām ir pieejamas pielāgotas tinumu iespējas.
Automātiski vadāmi transportlīdzekļi (AGV): tiek izmantoti kā piedziņas riteņu motori vai pacelšanas mehānismu izpildmehānismi noliktavu robotos un materiālu apstrādes transportlīdzekļos.
Rūpnieciskā automatizācija: Ideāli piemērota indeksēšanas galdiem, konveijeru piedziņām un automatizētām montāžas līniju izpildmehānismiem, kam nepieciešama precīza kustības vadība.
Sadarbības roboti (koboti): piemēroti kopīgiem izpildmehānismiem vieglkravas kobotos, kur būtiska ir kompaktums un vienmērīga kustība.
Medicīniskais aprīkojums: izmanto ķirurģiskajos galdos, pacientu pacēlājos un attēlveidošanas sistēmu pozicionēšanas mehānismos.